Page 1 of 1
n A general 4 x 4 transformation matrix is given by: coso, -sino, cosa sino, sin a a, coso, sino, coso, cosa -coso, sin
Posted: Mon May 16, 2022 6:09 am
by answerhappygod
- N A General 4 X 4 Transformation Matrix Is Given By Coso Sino Cosa Sino Sin A A Coso Sino Coso Cosa Coso Sin 1 (94.31 KiB) Viewed 59 times
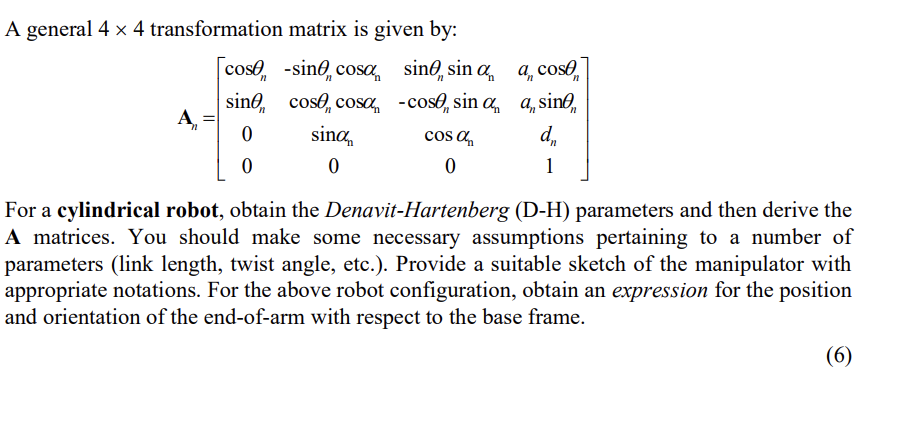
n A general 4 x 4 transformation matrix is given by: coso, -sino, cosa sino, sin a a, coso, sino, coso, cosa -coso, sin an a, sino, A 0 sinan cosan d 0 0 0 1 For a cylindrical robot, obtain the Denavit-Hartenberg (D-H) parameters and then derive the A matrices. You should make some necessary assumptions pertaining to a number of parameters (link length, twist angle, etc.). Provide a suitable sketch of the manipulator with appropriate notations. For the above robot configuration, obtain an expression for the position and orientation of the end-of-arm with respect to the base frame. (6)