Page 1 of 1
b. For a two-link planar arm as shown in Figure 2, derive its forward kinematics to determine the location at centre of
Posted: Mon May 16, 2022 6:07 am
by answerhappygod
- B For A Two Link Planar Arm As Shown In Figure 2 Derive Its Forward Kinematics To Determine The Location At Centre Of 1 (111 KiB) Viewed 65 times
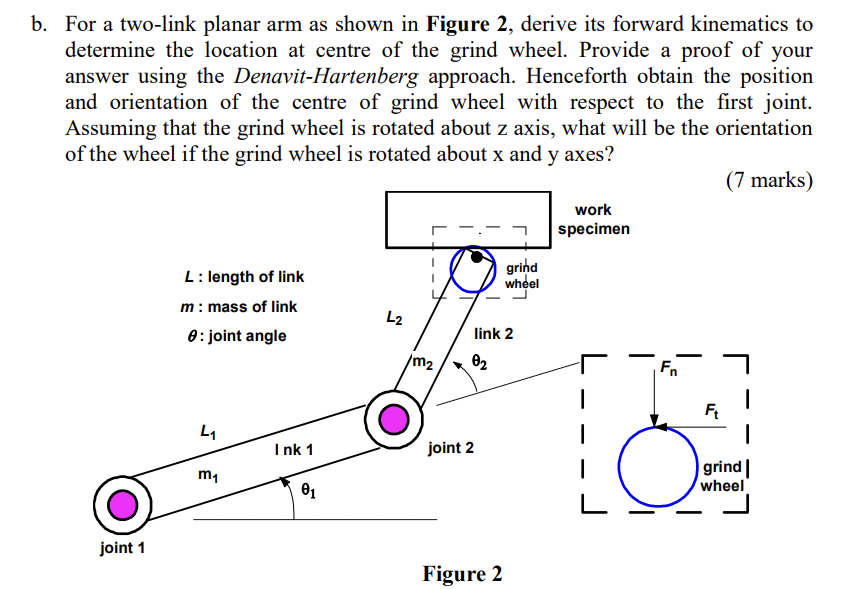
b. For a two-link planar arm as shown in Figure 2, derive its forward kinematics to determine the location at centre of the grind wheel. Provide a proof of your answer using the Denavit-Hartenberg approach. Henceforth obtain the position and orientation of the centre of grind wheel with respect to the first joint. Assuming that the grind wheel is rotated about z axis, what will be the orientation of the wheel if the grind wheel is rotated about x and y axes? (7 marks) work specimen grind wheel L: length of link m: mass of link 0: joint angle L2 link 2 02 /m2 Fn 1 Ft L1 Ink 1 joint 2 m1 LO grind wheel 01 joint 1 Figure 2