Page 1 of 1
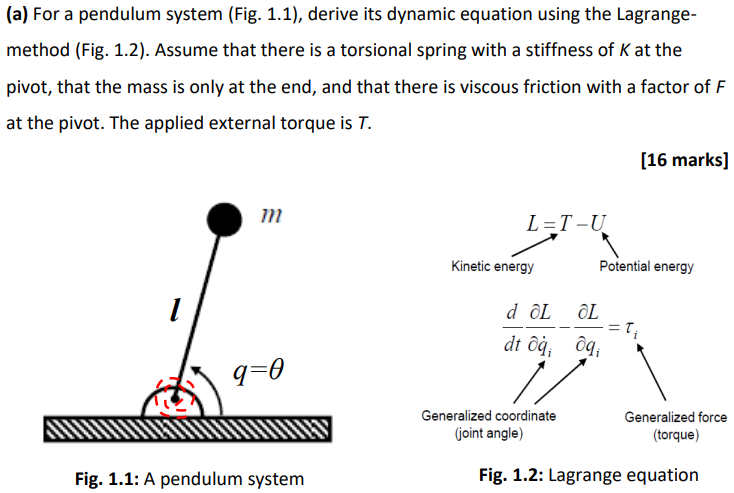
(a) For a pendulum system (Fig. 1.1), derive its dynamic equation using the Lagrange- method (Fig. 1.2). Assume that the
Posted: Sun May 15, 2022 11:31 pm
by answerhappygod
- A For A Pendulum System Fig 1 1 Derive Its Dynamic Equation Using The Lagrange Method Fig 1 2 Assume That The 1 (93.81 KiB) Viewed 49 times
(a) For a pendulum system (Fig. 1.1), derive its dynamic equation using the Lagrange- method (Fig. 1.2). Assume that there is a torsional spring with a stiffness of K at the pivot, that the mass is only at the end, and that there is viscous friction with a factor of F at the pivot. The applied external torque is T. [16 marks) m L=T-U Kinetic energy Potential energy 1 d OL al dt ca ca, Ti q=0 Generalized coordinate (joint angle) Generalized force (torque) Fig. 1.1: A pendulum system Fig. 1.2: Lagrange equation