Page 1 of 1
6 67% + O Question 5 a) A point P in space is defined as "p - (64.5)" relative to frame B with axis (Xs, Y»Za) which is
Posted: Sun May 15, 2022 11:25 pm
by answerhappygod
- 6 67 O Question 5 A A Point P In Space Is Defined As P 64 5 Relative To Frame B With Axis Xs Y Za Which Is 1 (57.16 KiB) Viewed 36 times
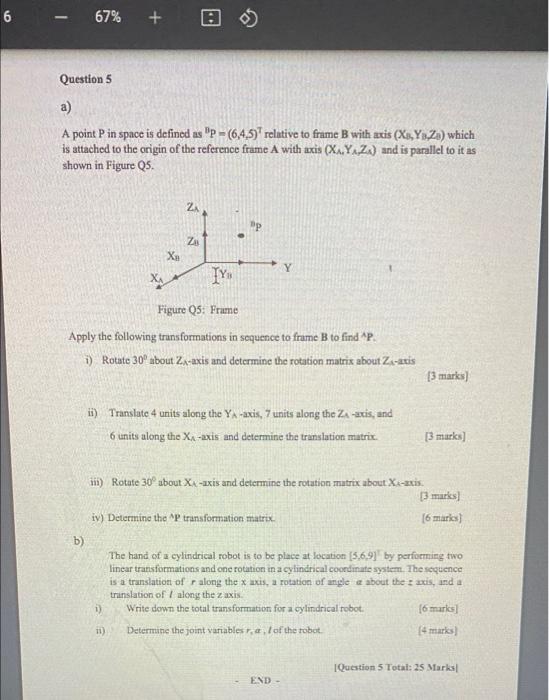
6 67% + O Question 5 a) A point P in space is defined as "p - (64.5)" relative to frame B with axis (Xs, Y»Za) which is attached to the origin of the reference frame A with axis (XA, YAZA) and is parallel to it as shown in Figure Q5 ZA ZN X Y IY Figure 05: Frame Apply the following trunsformations in sequence to frame B to find P. i) Rotate 30" about Z-axis and determine the rotation matrix about Z-axis [3 marks) ii) Translate 4 units along the Yx -axis, 7 units along the ZA-axis, and 6 units along the Xx-axis and determine the translation matrix [3 marks) m) Rotate 30 about Xx-axis and determine the rotation matrex about Xxx 13 marks (6 marios iv) Determine the transformation matrix b) The hand of a cylindrical robot is to be place at location (5,69] by performing two linear transformations and one rotation in a cylindrical coordinate system. The sequence is a translation of r along the x nxis, a rotation of angle a about the = sis, and a translation of / along the z axis. Write down the total transformation for a cylindrical robot (6 maris Determine the joint variables. 4. lof the robot (4 marks 1) 11) Question 5 Total: 25 Marks END -