Page 1 of 1
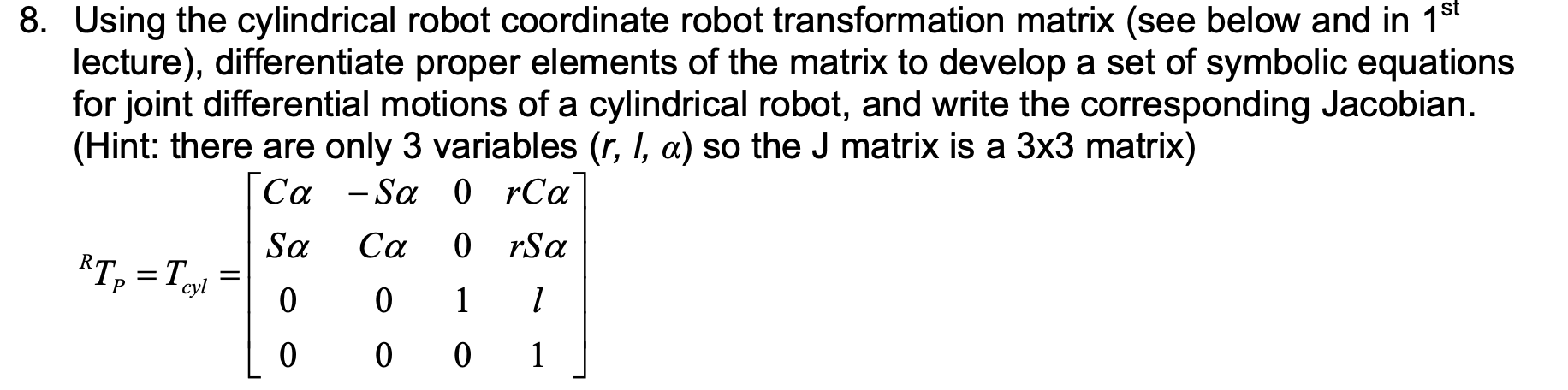
8. Using the cylindrical robot coordinate robot transformation matrix (see below and in 1st lecture), differentiate prop
Posted: Sun May 15, 2022 11:19 pm
by answerhappygod
- 8 Using The Cylindrical Robot Coordinate Robot Transformation Matrix See Below And In 1st Lecture Differentiate Prop 1 (72.2 KiB) Viewed 48 times
8. Using the cylindrical robot coordinate robot transformation matrix (see below and in 1st lecture), differentiate proper elements of the matrix to develop a set of symbolic equations for joint differential motions of a cylindrical robot, and write the corresponding Jacobian. (Hint: there are only 3 variables (r, I, a) so the J matrix is a 3x3 matrix) [Ca -Sa 0 rCa Sa Ca 0 rsa RTA =T. 0 0 1 1 = Р cyl 0 0 0 1