Page 1 of 1
Question A.1 A feedback control system for a mobile robot is shown in Figure A. 1.1. a R(s) C(s) PID(S) 1 0.592 + 1.5s +
Posted: Sun May 15, 2022 11:08 pm
by answerhappygod
- Question A 1 A Feedback Control System For A Mobile Robot Is Shown In Figure A 1 1 A R S C S Pid S 1 0 592 1 5s 1 (90.28 KiB) Viewed 38 times
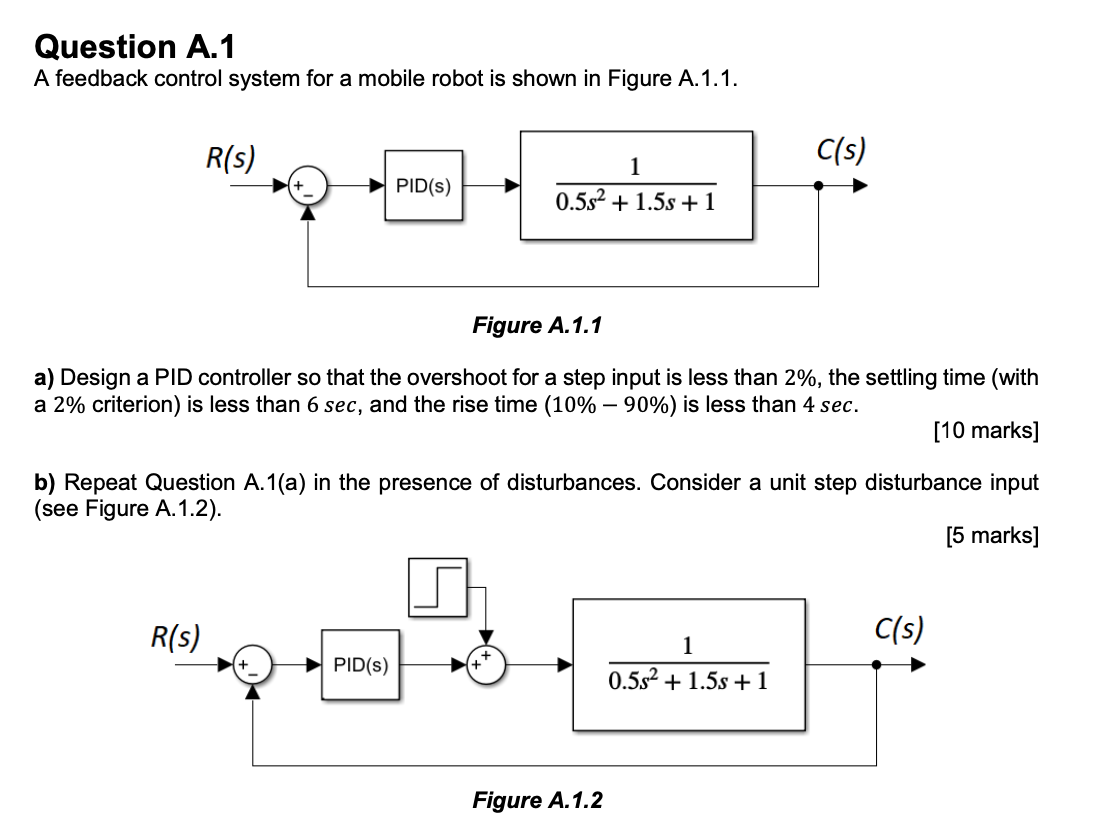
Question A.1 A feedback control system for a mobile robot is shown in Figure A. 1.1. a R(s) C(s) PID(S) 1 0.592 + 1.5s + 1 Figure A.1.1 a) Design a PID controller so that the overshoot for a step input is less than 2%, the settling time (with a 2% criterion) is less than 6 sec, and the rise time (10% - 90%) is less than 4 sec. [10 marks] b) Repeat Question A.1(a) in the presence of disturbances. Consider a unit step disturbance input (see Figure A.1.2). [5 marks] R(s) C(s) PID(S) 1 0.582 + 1.5s + 1 Figure A.1.2