Page 1 of 1
Input Torque Tmotor(t) Groung J B The figure above shows schematically a rotational system defined by 2 identical inerti
Posted: Sun May 15, 2022 10:58 pm
by answerhappygod
- Input Torque Tmotor T Groung J B The Figure Above Shows Schematically A Rotational System Defined By 2 Identical Inerti 1 (107.7 KiB) Viewed 50 times
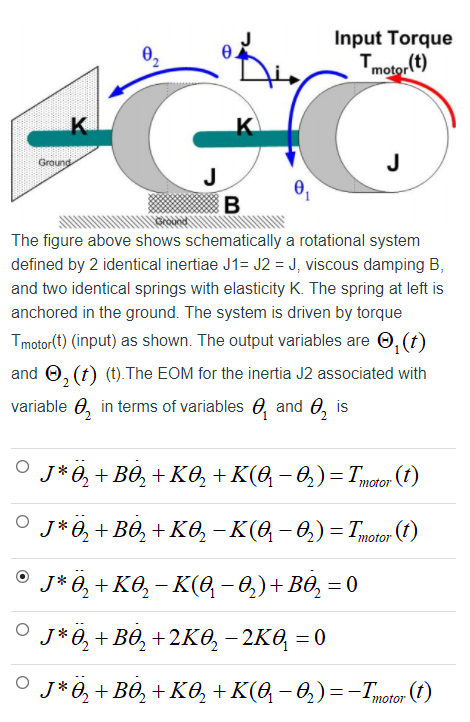
Input Torque Tmotor(t) Groung J B The figure above shows schematically a rotational system defined by 2 identical inertiae J15 J2 = J, viscous damping B, and two identical springs with elasticity K. The spring at left is anchored in the ground. The system is driven by torque Tmotor(t) (input) as shown. The output variables are ,(t) and (t) (t). The EOM for the inertia J2 associated with variable e, in terms of variables , and , is O J* 0,+B02 +K0, +K(0-0) = Tmotor (1) o J*,+B02 +KO, -K0-02) = Tmotor (t) J* 7, +K0, - K(Q -0,+B0, = 0 - J*0, +BO, +2K02 – 2K0 = 0 J*72 +B02 +KO, +K(0-0)=-Tmotor. (t) -