Page 1 of 1
= A fourth order dynamic system (EOM) is defined as Mi*x, +B*xı + 2K1*x; -B* , -K1* x2 = u(t) -B*x; -K1* x2 +M2* x2 +B*
Posted: Sun May 15, 2022 10:55 pm
by answerhappygod
- A Fourth Order Dynamic System Eom Is Defined As Mi X B Xi 2k1 X B K1 X2 U T B X K1 X2 M2 X2 B 1 (38.58 KiB) Viewed 38 times
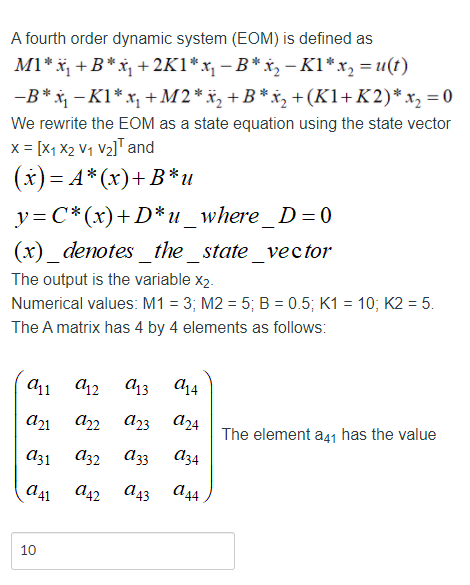
= A fourth order dynamic system (EOM) is defined as Mi*x, +B*xı + 2K1*x; -B* , -K1* x2 = u(t) -B*x; -K1* x2 +M2* x2 +B* x2 +(K1+K 2)* x2 = 0 We rewrite the EOM as a state equation using the state vector X = [X1 X2 V1 V2]" and (x) = A*(x)+B* u y=C*(x)+D*u_where_D=0 (x)_denotes _the_state_vector The output is the variable x2 Numerical values: M1 = 3; M2 = 5; B = 0.5; K1 = 10; K2 = 5. The A matrix has 4 by 4 elements as follows: 011 012 413 414 021 022 023 d24 The element 841 has the value 031 d32 (33 034 041 042 043 044 10