Page 1 of 1
K M Input: Force F(t) M J has mass m с Ground D Ground The figure above shows schematically a translational+rotational s
Posted: Sun May 15, 2022 10:53 pm
by answerhappygod
- 1 (103.75 KiB) Viewed 46 times
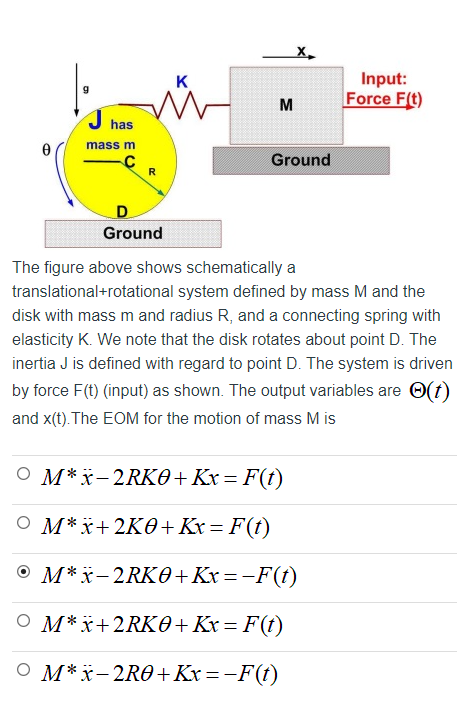
K M Input: Force F(t) M J has mass m с Ground D Ground The figure above shows schematically a translational+rotational system defined by mass M and the disk with mass m and radius R, and a connecting spring with elasticity K. We note that the disk rotates about point D. The inertia J is defined with regard to point D. The system is driven by force F(t) (input) as shown. The output variables are (t) and x(t). The EOM for the motion of mass M is OM*X-2RKO+Kx= F(t) O M*x+ 2KO+Kr = F(t) O M*7-2RKO+Kr=-F(t) OM* +2RKO+Kr=F(t) O M*8–2RO+Kx=-F(t)