Page 1 of 1
0.25 3. Question (25 marks) A Direct Current (DC) motor for robot manipulator has been modelled with a transfer function
Posted: Sun May 15, 2022 10:09 pm
by answerhappygod
- 0 25 3 Question 25 Marks A Direct Current Dc Motor For Robot Manipulator Has Been Modelled With A Transfer Function 1 (75.48 KiB) Viewed 37 times
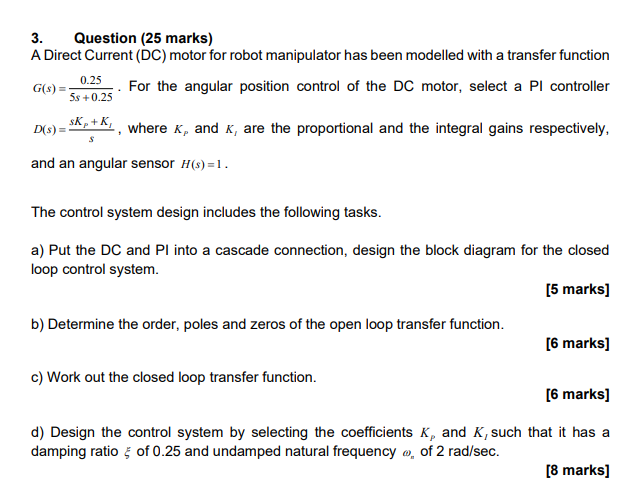
0.25 3. Question (25 marks) A Direct Current (DC) motor for robot manipulator has been modelled with a transfer function G(S) = For the angular position control of the DC motor, select a Pl controller 5s +0.25 sK+K, where K, and K, are the proportional and the integral gains respectively, and an angular sensor H($)=1. D(S) = S The control system design includes the following tasks. a) Put the DC and Pl into a cascade connection, design the block diagram for the closed loop control system. [5 marks] b) Determine the order, poles and zeros of the open loop transfer function. [6 marks] c) Work out the closed loop transfer function. [6 marks] d) Design the control system by selecting the coefficients K, and K, such that it has a damping ratio of 0.25 and undamped natural frequency of 2 rad/sec. [8 marks]