Page 1 of 1
5:48 PM Mon May 9 89% 2. (25%) Figure 3(a) shows a three fingered hand grasping an object. Each finger has three single-
Posted: Sun May 15, 2022 9:25 pm
by answerhappygod
- 5 48 Pm Mon May 9 89 2 25 Figure 3 A Shows A Three Fingered Hand Grasping An Object Each Finger Has Three Single 1 (70.05 KiB) Viewed 49 times
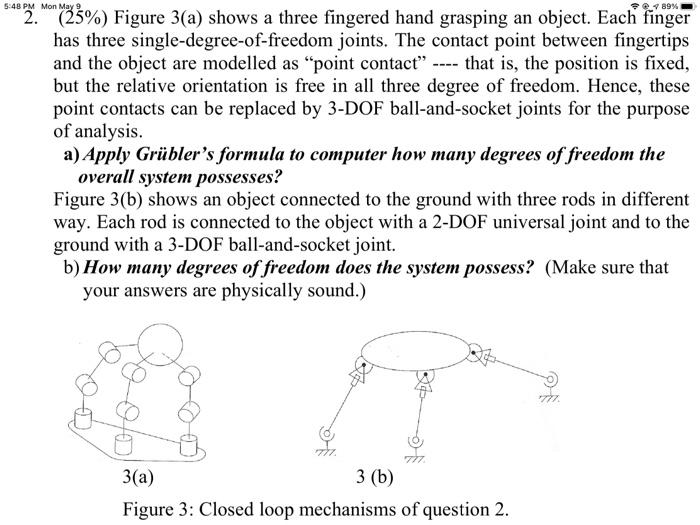
5:48 PM Mon May 9 89% 2. (25%) Figure 3(a) shows a three fingered hand grasping an object. Each finger has three single-degree-of-freedom joints. The contact point between fingertips and the object are modelled as “point contact" ---- that is, the position is fixed, but the relative orientation is free in all three degree of freedom. Hence, these point contacts can be replaced by 3-DOF ball-and-socket joints for the purpose of analysis. a) Apply Grübler's formula to computer how many degrees of freedom the overall system possesses? Figure 3(b) shows an object connected to the ground with three rods in different way. Each rod is connected to the object with a 2-DOF universal joint and to the ground with a 3-DOF ball-and-socket joint. b) How many degrees of freedom does the system possess? (Make sure that your answers are physically sound.) 3(a) 3 (b) Figure 3: Closed loop mechanisms of question 2.