Page 1 of 1
Background We are ready to consider methods for designing control systems. A basic controller prototype is one that uses
Posted: Sun May 15, 2022 7:29 pm
by answerhappygod
- Background We Are Ready To Consider Methods For Designing Control Systems A Basic Controller Prototype Is One That Uses 1 (127.91 KiB) Viewed 40 times
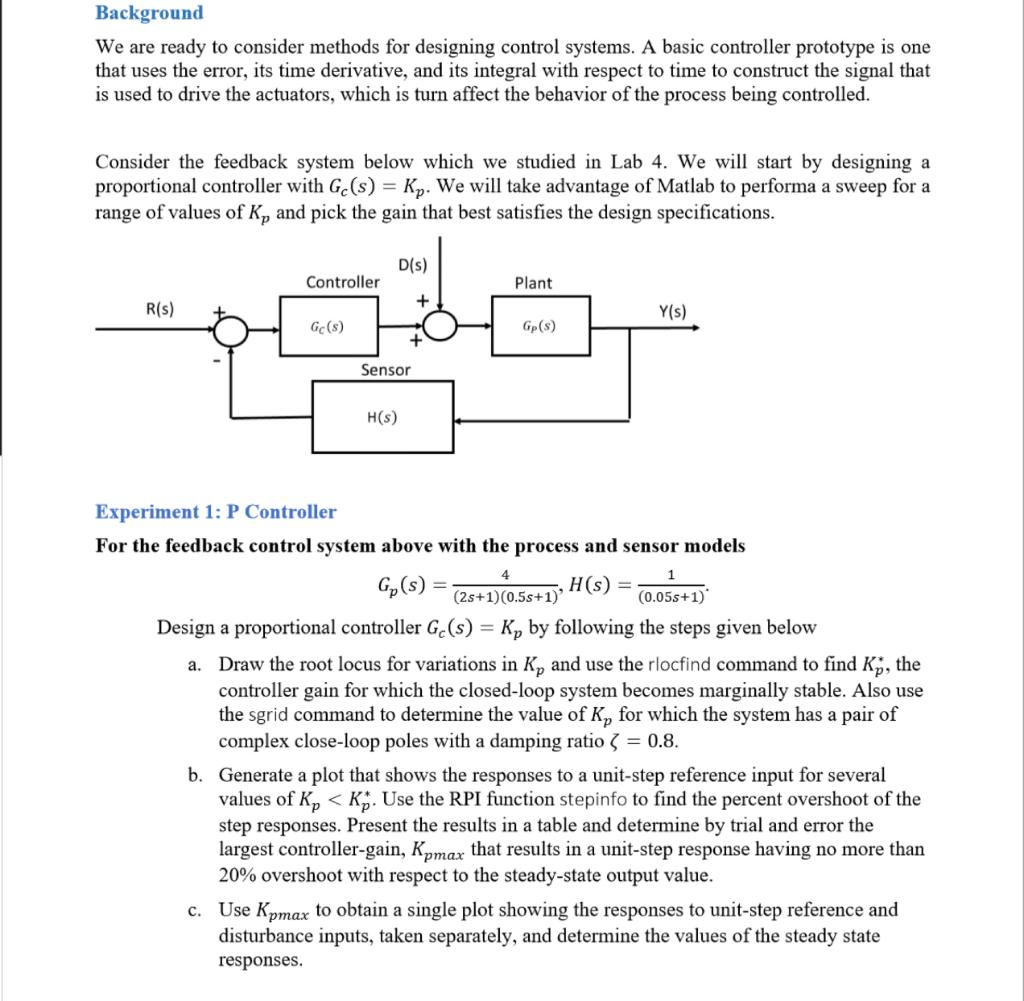
Background We are ready to consider methods for designing control systems. A basic controller prototype is one that uses the error, its time derivative, and its integral with respect to time to construct the signal that is used to drive the actuators, which is turn affect the behavior of the process being controlled. Consider the feedback system below which we studied in Lab 4. We will start by designing a proportional controller with Gc(s) = Kp. We will take advantage of Matlab to performa a sweep for a range of values of K, and pick the gain that best satisfies the design specifications. D(s) Controller Plant + R(s) Y(s) Gc (8) Gp(s) Sensor H(S) 4 1 Experiment 1: P Controller For the feedback control system above with the process and sensor models Ge(s) H(S) = (25+1)(0.5s+1) (0.05s+1) Design a proportional controller Gc(s) = K, by following the steps given below a. Draw the root locus for variations in K, and use the rlocfind command to find Kp, the controller gain for which the closed-loop system becomes marginally stable. Also use the sgrid command to determine the value of K, for which the system has a pair of a complex close-loop poles with a damping ratio ? = 0.8. b. Generate a plot that shows the responses to a unit-step reference input for several values of Ky <K. Use the RPI function stepinfo to find the percent overshoot of the step responses. Present the results in a table and determine by trial and error the largest controller-gain, Kpmax that results in a unit-step response having no more than 20% overshoot with respect to the steady-state output value. c. Use Kpmax to obtain a single plot showing the responses to unit-step reference and disturbance inputs, taken separately, and determine the values of the steady state responses.