Page 1 of 1
The block diagram of a position control system of an object holder robot is shown below. 1) Use the method of Ziegler-Ni
Posted: Sun May 15, 2022 4:03 pm
by answerhappygod
- The Block Diagram Of A Position Control System Of An Object Holder Robot Is Shown Below 1 Use The Method Of Ziegler Ni 1 (48.04 KiB) Viewed 60 times
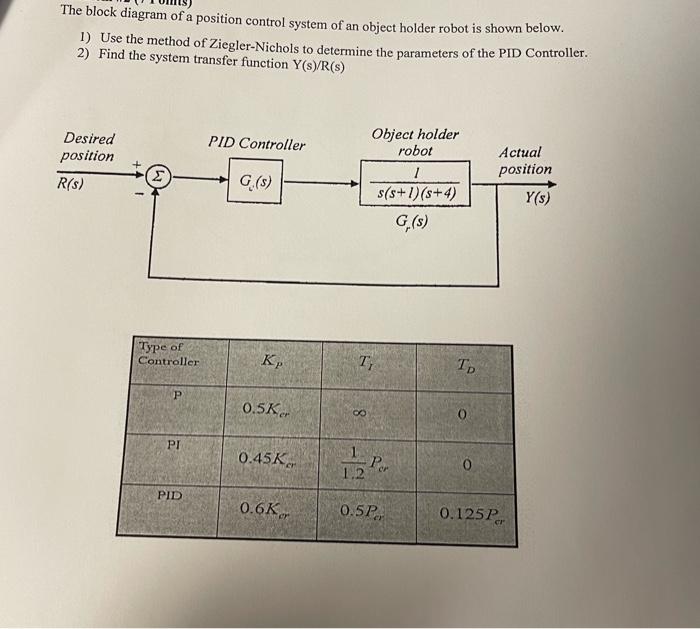
The block diagram of a position control system of an object holder robot is shown below. 1) Use the method of Ziegler-Nichols to determine the parameters of the PID Controller. 2) Find the system transfer function Y(S)/R(S) PID Controller Desired position R(S) Σ G. (s) Object holder robot 1 s(s+1)(+4) G(s) Actual position Y(s) Type of Controller Кр 7 To P 0.5K 00 0 PI 0.45K. S. 0 1.2 PID 0.6K 0.5P 0.125P