Page 1 of 1
A motor modelled by 8 G(8) = $ + 4 is controlled by an analogue compensator 2s +1 D(s) = K 5 + 3 where the gain K is a p
Posted: Sun May 15, 2022 3:02 pm
by answerhappygod
- A Motor Modelled By 8 G 8 4 Is Controlled By An Analogue Compensator 2s 1 D S K 5 3 Where The Gain K Is A P 1 (52.25 KiB) Viewed 63 times
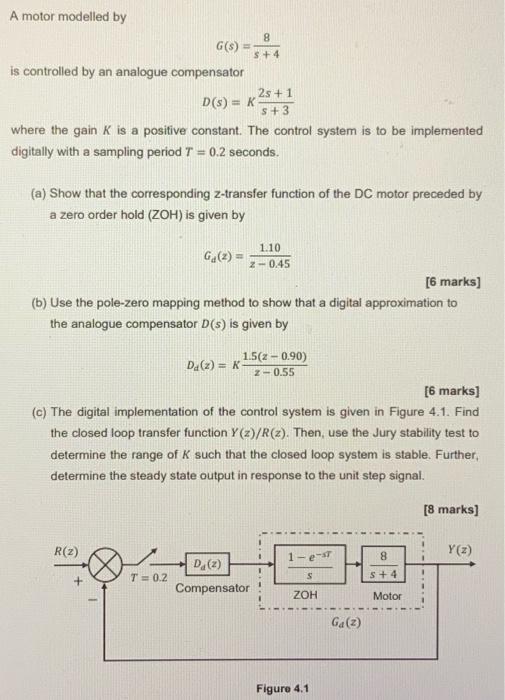
A motor modelled by 8 G(8) = $ + 4 is controlled by an analogue compensator 2s +1 D(s) = K 5 + 3 where the gain K is a positive constant. The control system is to be implemented digitally with a sampling period T = 0.2 seconds. (a) Show that the corresponding Z-transfer function of the DC motor preceded by a zero order hold (ZOH) is given by 1.10 20.45 Ga(2) = [6 marks] (b) Use the pole-zero mapping method to show that a digital approximation to the analogue compensator D(s) is given by 1.5(2-0.90) D.(x) = K 2-0.55 [6 marks] (c) The digital implementation of the control system is given in Figure 4.1. Find the closed loop transfer function Y (2)/R(2). Then, use the Jury stability test to determine the range of K such that the closed loop system is stable. Further, determine the steady state output in response to the unit step signal. [8 marks] R(2) 1 Y(z) 8 1 1 T 0.2 D.(2) Compensator S S + 4 ZOH Motor Ga(2) Figure 4.1