Page 1 of 1
c) In the experiments, we will design proportional-velocity (PV) controller such that the input voltage of the motor, Vm
Posted: Sun May 15, 2022 2:20 pm
by answerhappygod
- C In The Experiments We Will Design Proportional Velocity Pv Controller Such That The Input Voltage Of The Motor Vm 1 (83.05 KiB) Viewed 61 times
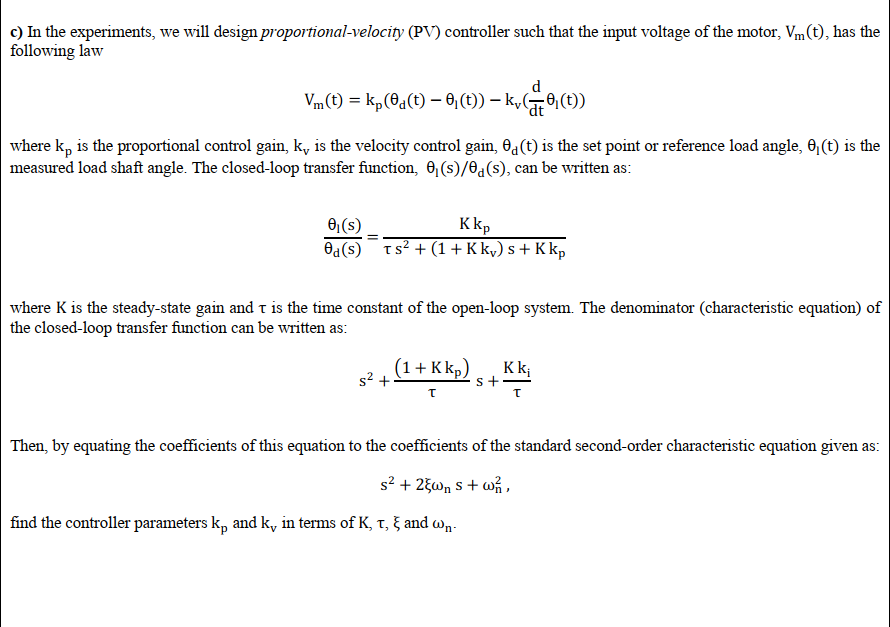
c) In the experiments, we will design proportional-velocity (PV) controller such that the input voltage of the motor, Vm(t), has the following law d Vm(t) = kp (Ca(t) – 0 ()) – kvG8(t)) dt where kp is the proportional control gain, k, is the velocity control gain, Oa(t) is the set point or reference load angle, 07 (t) is the measured load shaft angle. The closed-loop transfer function, 6(s)/d(s), can be written as: 05 Kkp od(s) 152 + (1 + K ky) s + K kp where K is the steady-state gain and t is the time constant of the open-loop system. The denominator (characteristic equation) of the closed-loop transfer function can be written as: s? + (1 + K kp) Kk S + τ τ Then, by equating the coefficients of this equation to the coefficients of the standard second-order characteristic equation given as: 52 + 2Ewn s+wa find the controller parameters kp and k, in terms of K, T, & and wn-