Page 1 of 1
02 03 01 Тө. Zbu -УЫ Question 5 [20 marks] Find the inverse kinematics equations for the manipulator in Figure Q5. In ot
Posted: Thu May 12, 2022 1:16 pm
by answerhappygod
- 1 (135.33 KiB) Viewed 41 times
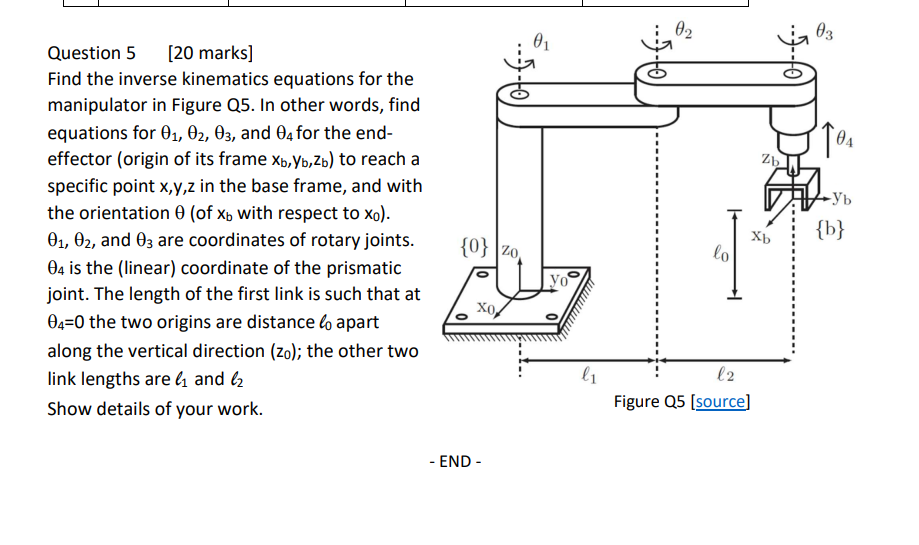
02 03 01 Тө. Zbu -УЫ Question 5 [20 marks] Find the inverse kinematics equations for the manipulator in Figure Q5. In other words, find equations for 01, 02, 03, and 04 for the end- effector (origin of its frame Xb, Yb, Zb) to reach a specific point x,y,z in the base frame, and with the orientation 0 (of Xb with respect to xo). 01, 02, and 03 are coordinates of rotary joints. 04 is the linear) coordinate of the prismatic joint. The length of the first link is such that at 04=0 the two origins are distance lo apart along the vertical direction (zo); the other two link lengths are li and lz Show details of your work. xb {b} {0} 20 lo Xo li 12 Figure Q5 (source) -END-