Page 1 of 1
A camera with K = I is looking at a scene. Its projection matrix is given by P = where R is a rotation matrix. [R t], (a
Posted: Thu May 12, 2022 7:37 am
by answerhappygod
- A Camera With K I Is Looking At A Scene Its Projection Matrix Is Given By P Where R Is A Rotation Matrix R T A 1 (84.58 KiB) Viewed 28 times
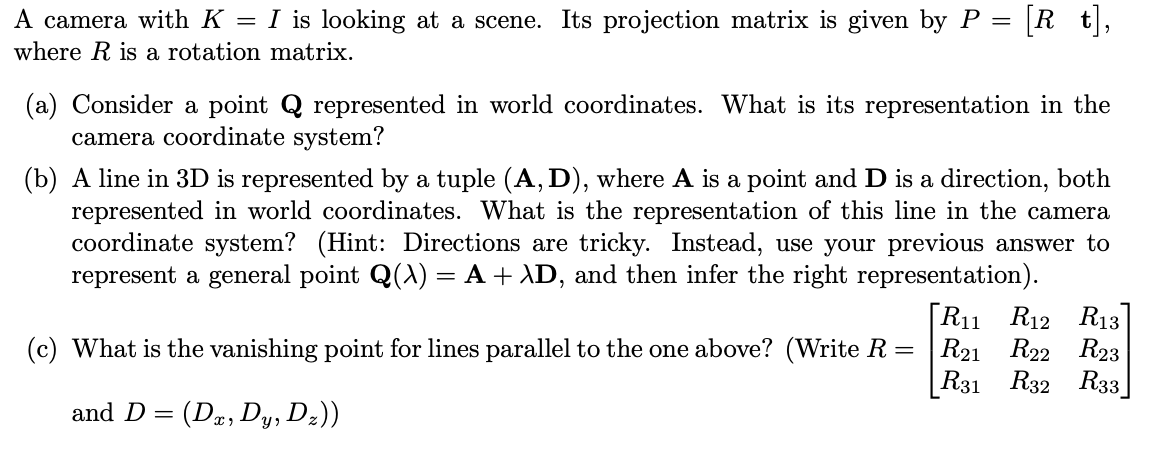
A camera with K = I is looking at a scene. Its projection matrix is given by P = where R is a rotation matrix. [R t], (a) Consider a point Q represented in world coordinates. What is its representation in the camera coordinate system? (b) A line in 3D is represented by a tuple (A, D), where A is a point and D is a direction, both represented in world coordinates. What is the representation of this line in the camera coordinate system? (Hint: Directions are tricky. Instead, use your previous answer to represent a general point Q(1) = A + \D, and then infer the right representation). [Rui R12 R13 (c) What is the vanishing point for lines parallel to the one above? (Write R= R21 R22 R23 R31 R32 R33 and D= - (Dx, Dy, Dz))