Page 1 of 1
The response C(s) of the unity-feedback system shown below to a unit-step input does not meet desired transient specific
Posted: Mon May 09, 2022 9:40 am
by answerhappygod
- The Response C S Of The Unity Feedback System Shown Below To A Unit Step Input Does Not Meet Desired Transient Specific 1 (59.75 KiB) Viewed 29 times
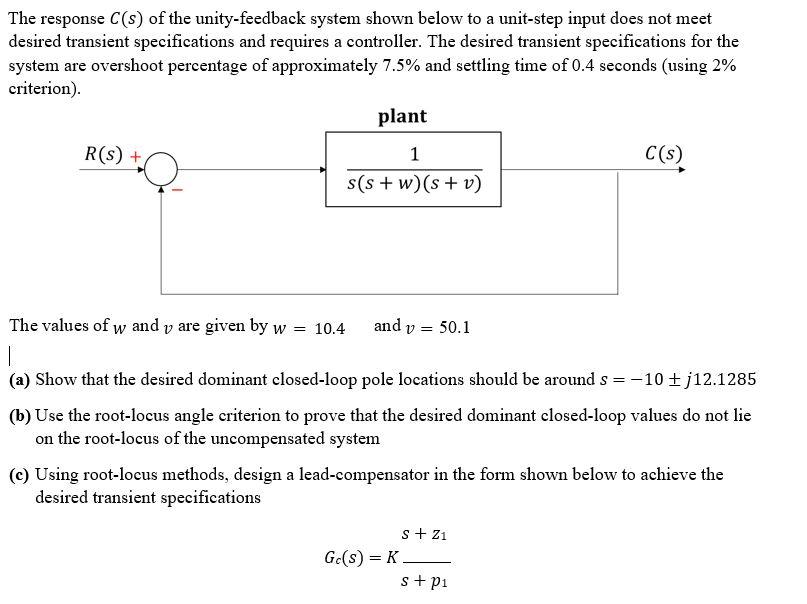
The response C(s) of the unity-feedback system shown below to a unit-step input does not meet desired transient specifications and requires a controller. The desired transient specifications for the system are overshoot percentage of approximately 7.5% and settling time of 0.4 seconds (using 2% criterion). plant R(S) + C(s) 1 s(s+ w)(s + v) = The values of w and y are given by w = 10.4 and y = 50.1 1 (a) Show that the desired dominant closed-loop pole locations should be around s=-10 j12.1285 (b) Use the root-locus angle criterion to prove that the desired dominant closed-loop values do not lie on the root-locus of the uncompensated system (c) Using root-locus methods, design a lead-compensator in the form shown below to achieve the desired transient specifications S + Z1 Ge(s) = K s+ p1