Page 1 of 1
5 Inverse Kinematics (15) Using Newton-Raphson method, perform numerical inverse kinematics to find joint variables od €
Posted: Mon May 09, 2022 9:38 am
by answerhappygod
- 5 Inverse Kinematics 15 Using Newton Raphson Method Perform Numerical Inverse Kinematics To Find Joint Variables Od 1 (61.51 KiB) Viewed 28 times
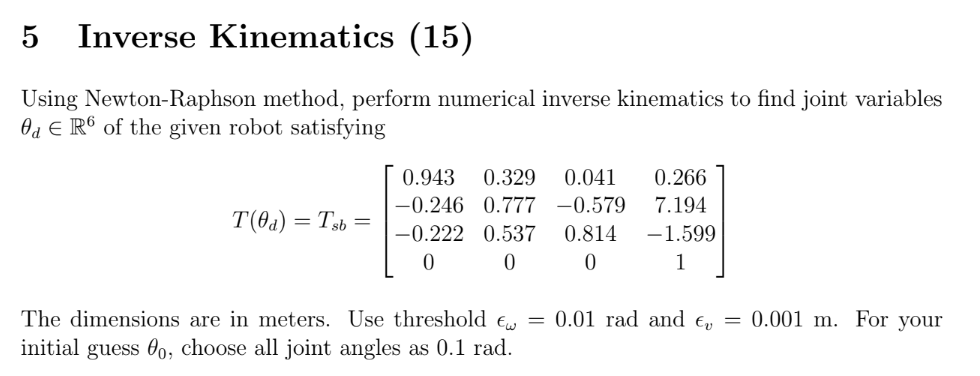
5 Inverse Kinematics (15) Using Newton-Raphson method, perform numerical inverse kinematics to find joint variables od € R6 of the given robot satisfying T(@d) = T3b = = 0.943 0.329 0.041 -0.246 0.777 -0.579 -0.222 0.537 0.814 0 0 0 0.266 7.194 -1.599 1 The dimensions are in meters. Use threshold ew = 0.01 rad and €y = 0.001 m. For your initial guess 0o, choose all joint angles as 0.1 rad.