Page 1 of 1
Question B1. Root Locus Design In this part of your exam you will need to design a controller for a vehicle system model
Posted: Mon May 09, 2022 7:37 am
by answerhappygod
- Question B1 Root Locus Design In This Part Of Your Exam You Will Need To Design A Controller For A Vehicle System Model 1 (42.53 KiB) Viewed 24 times
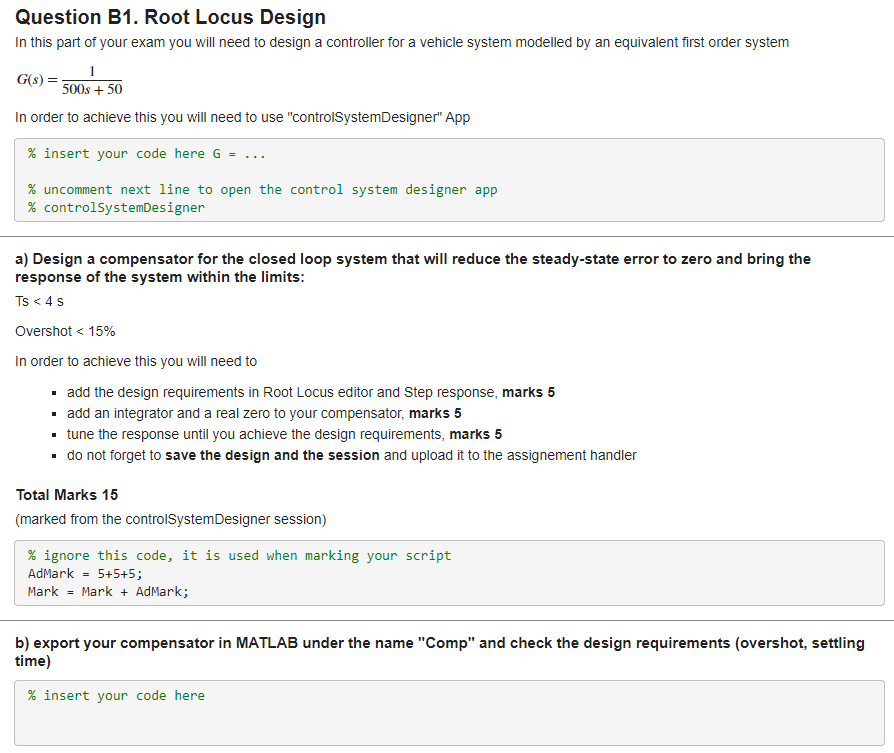
Question B1. Root Locus Design In this part of your exam you will need to design a controller for a vehicle system modelled by an equivalent first order system 1 G(s) 500s + 50 In order to achieve this you will need to use "controlSystemDesigner" App % insert your code here G = .. % uncomment next line to open the control system designer app % controlsystemDesigner a) Design a compensator for the closed loop system that will reduce the steady-state error to zero and bring the response of the system within the limits: Ts <45 Overshot < 15% In order to achieve this you will need to · add the design requirements in Root Locus editor and Step response, marks 5 · add an integrator and a real zero to your compensator, marks 5 • tune the response until you achieve the design requirements, marks 5 · do not forget to save the design and the session and upload it to the assignement handler Total Marks 15 (marked from the controlSystemDesigner session) % ignore this code, it is used when marking your script AdMark 5+5+5; Mark = Mark + AdMark; = b) export your compensator in MATLAB under the time) ame "Comp" and check the design requirements (ov shot, settling % insert your code here
Question B2. Steady-state respone and error For the system given in transfer function representation 5 G(S) = 52 + 3s + 4.9 a) Determine the steady-state response of the OL system 5 $2 + 3s + 4.9 1 Output Input Transfer Fon to step input. % insert your code here Marks 2 % ignore this code, it is used when marking your script AdMark = 2; Mark = Mark + AdMark; b) Determine the steady-state error of the unit feedback closed loop system 5 32 + 3s +4.9 Input error 1 Output % insert your code here