Page 1 of 1
• A drone IMU sensor measures the angular velocity of the drone in the body frame. At time t = 0, the initial Euler angl
Posted: Thu May 05, 2022 6:05 pm
by answerhappygod
- A Drone Imu Sensor Measures The Angular Velocity Of The Drone In The Body Frame At Time T 0 The Initial Euler Angl 1 (69.98 KiB) Viewed 44 times
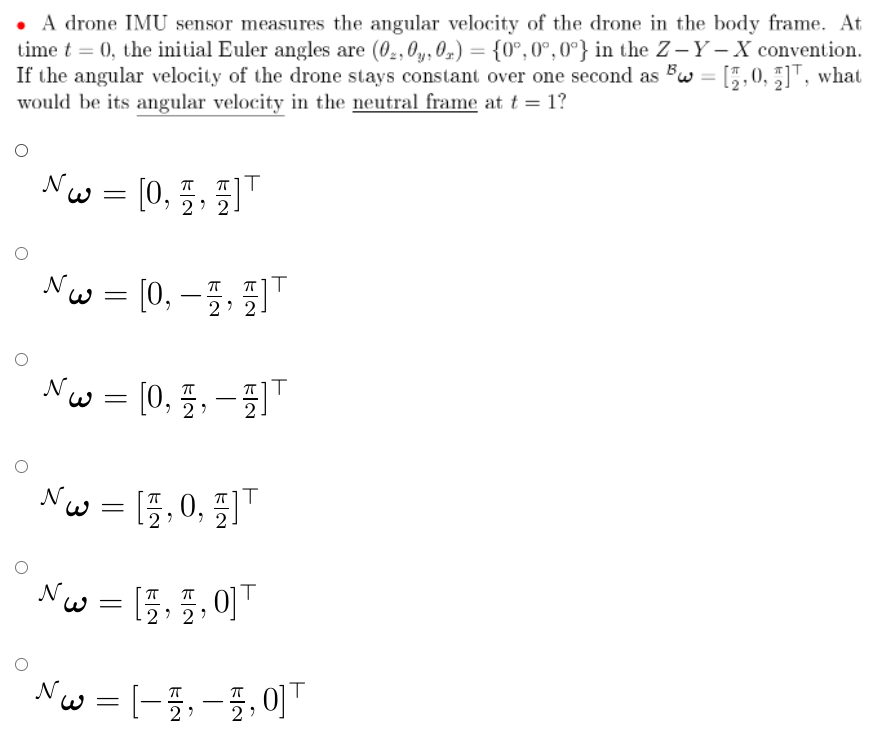
• A drone IMU sensor measures the angular velocity of the drone in the body frame. At time t = 0, the initial Euler angles are (0, 0, 0) = {0°, 0°, 0°} in the Z - Y - X convention. If the angular velocity of the drone stays constant over one second as Bo = [2, 0, 2]T, what would be its angular velocity in the neutral frame at t = 1? No = 0, 2, = TI TIT 2' 2. No = [0, - 2,2 No = Nu IT = [0, 5, - ] T No = [5, 0, 2 : = N: No = [2, 2,0] T No = - = - =,0] π 22 ㅠ T1T T