Page 1 of 1
Design workspace consists of tables, robot and gripper, write melfabasic code and simulate it SSSS B Using RT toolbox, d
Posted: Mon May 02, 2022 12:44 pm
by answerhappygod
- Design Workspace Consists Of Tables Robot And Gripper Write Melfabasic Code And Simulate It Ssss B Using Rt Toolbox D 1 (53.74 KiB) Viewed 41 times
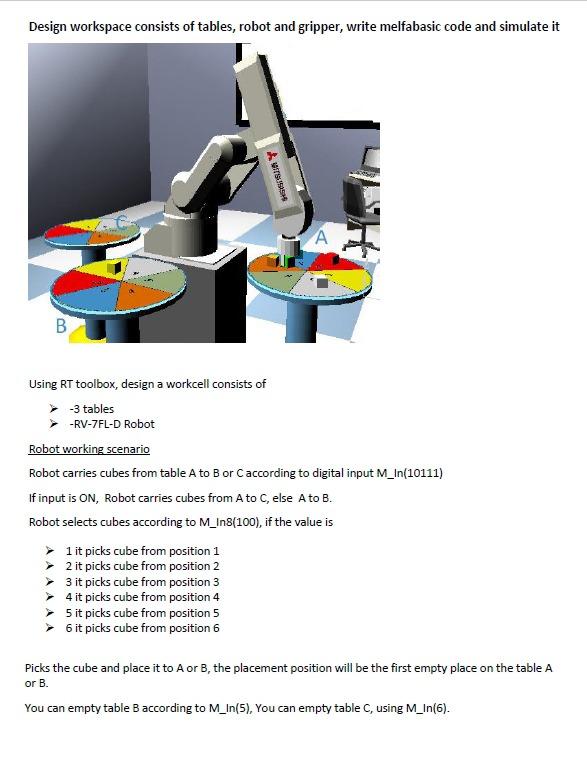
Design workspace consists of tables, robot and gripper, write melfabasic code and simulate it SSSS B Using RT toolbox, design a workcell consists of > -3 tables > -RV-7FL-D Robot Robot working scenario Robot carries cubes from table A to B or Caccording to digital input M_In(10111) If input is ON, Robot carries cubes from A to Celse A to B. Robot selects cubes according to M_Ins(100), if the value is 1 it picks cube from position 1 2 it picks cube from position 2 3 it picks cube from position 3 4 it picks cube from position 4 5 it picks cube from position 5 ► 6 it picks cube from position 6 Picks the cube and place it to A or B, the placement position will be the first empty place on the table A or B. You can empty table B according to M_In(5), You can empty table C, using M_In(6).